고정 헤더 영역
상세 컨텐츠
본문
728x90
반응형
AUTOSAR

AUTOSAR는 무엇인가?
AUTOSAR( AUTomotive Open System ARchitecture)
OSEK에서 더 발전된 표준협의체로 표준화된 플랫폼 및 아키텍처를 통해 비용 절감과 품질 향상을 목표로 만들어진 단체.
"Cooperate on standards, compete on implementation"이라는 기준 아래 형성된 글로벌 파트너쉽이다.

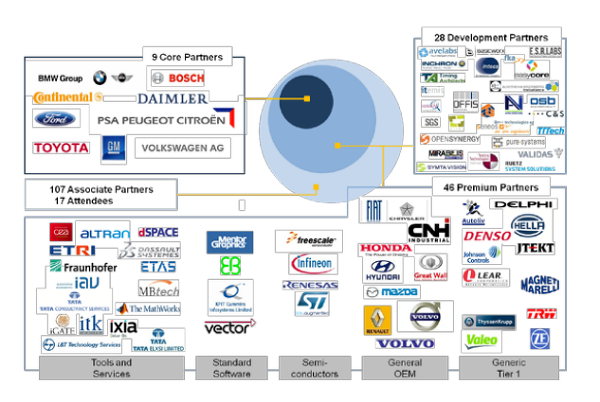
운영 조직
운영 조직은 참여 정도에 따라 4개 영역으로 나눠진다.
- Core Partners : 조직 및 행정 관리 파트너
- Premium Partners : Working group의 선도 및 개선 파트너
- Development Partners : 전문 지식 기여 파트너
- Associate Partners : AUTOSR 표준 사용 파트너
AUTOSAR 개발 과정
- Configure System : 시스템 설정 단계로서 컴포넌트의 구성 및 연결 등을 정의한다.
- Implement Component : 구성 및 연결한 컴포넌트에 대한 코드 구현한다.
- Extract ECU-Specific Information : 시스템 구성 정보로부터 특정 제어기의 소프트웨어를 구현하기 위한 정보를 추출한다.
- Configure ECU : 제어기에 관련된 설정을 진행한다.
- Generate Executable : 제어기에서 동작하는 실행 파일을 생성한다.

AUTOSAR 개발 과정은 Top-down 방식으로 개발된다.
시스템 설계자는 VFB(Virtual Functional Bus) 상에서 SW-C를 설계하며, SW-C간 데이터 이동은 Interface 와 Port로 정의한다.
Configure System 단계에서 SW-C를 특정 ECU에 할당하고 ECU Extract를 통해서 각각의 ECU에 설계 정보를 전달한다.
ECU는 SW-C간 또는 SW-C와 BSW간 구체적인 인터페이스를 RTE(Run-Time Environment)를 통해 구현한다.

AUTOSAR 아키텍처 구조
계층화된 구조 사용으로 서로 다른 업체별 개발 분담이 가능하다. (Application, BSW, MCAL)
HW와 독립적인 구조로 설계하기 때문에 SW Application 재사용이 가능하다.

Application Layer : 하드웨어에 독립적인 응용 프로그램 S/W를 정의, SWC 종류는 기능에 따라 Application, Actuator, Sensor 등으로 구별, SWC간 통신 및 SWC-BSW 사이 통신은 RTE를 이용.
RTE(RunTime Environment) : VFB로 모델화된 통신 구조가 실제 로컬 연결이나 네트워크 통신으로 구현된 환경, ECU에 독립적인 Interface Mapping을 SWC에 제공. RTE에 정의된 표준 인터페이스만을 이용하여 SWC 개발 가능.
BSW(Basic Software)
Service Layer : 시스템 구동 및 다른 BSW 모듈 제어를 위한 관리 서비스 제공
ECU Abstraction Layer : MCAL 드라이버들을 상위 계층에 Interface하는 추상화 계층. 외부 장치들을 사용하기 위한 드라이버 포함
Microcontroller Abstraction Layer : MCU 내부 장치를 이용하기 위한 드라이버들로 구성.
Complex Drivers : AUTOSAR 표준에 정의되지 않은 기능 구현을 위한 계층.

AUTOSAR Interface : 사용자 설정에 따라 생성되는 API ex)Rte_Read_<port>_<DataElement>, Rte_Call_<port>_<operation>
Standardized AUTOSAR Interface : AUTOSAR Interface와 동일한 API 구조를 갖지만 표준에 정의된 Interface를 사용.
Standarized Interface : 표준 Interface와 BSW 간 Data를 주고 받거나 동작을 실행하기 위한 API. ex)Com_SendSignal(id, data)
'공부 > 자동차 산업 & RnD' 카테고리의 다른 글
| [공부] Stateflow 2. 상태 머신 (0) | 2023.12.30 |
|---|---|
| [공부] AUTOSAR - RTE (0) | 2023.12.24 |
| [공부] state flow 교육 과정개요 (0) | 2023.12.18 |
| [공부]리튬이온전지 기술 (0) | 2023.07.23 |
| [공부]이차전지 (0) | 2023.07.19 |




